産業用ロボットの可能性を広げる
エヌエスティーのロボットシステム
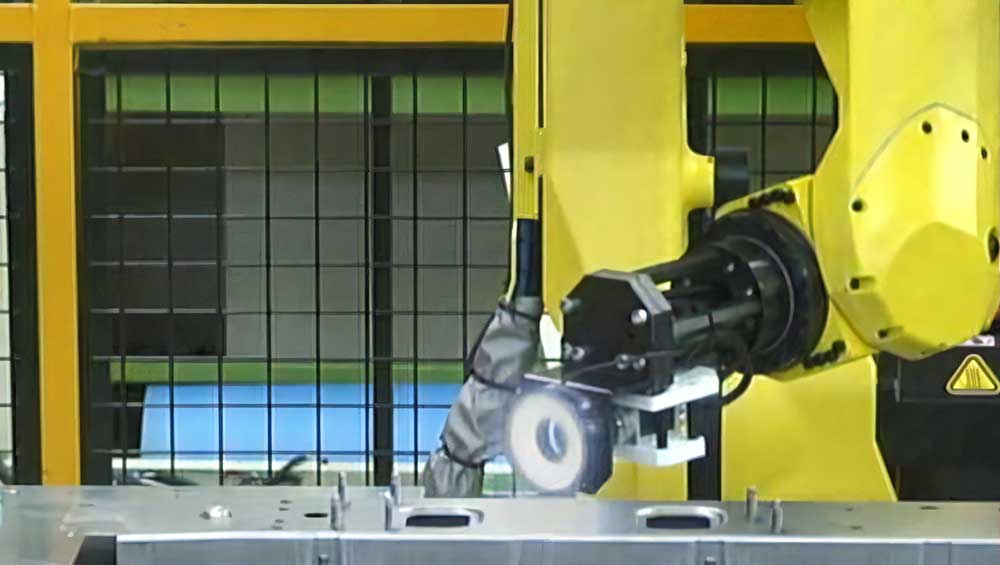
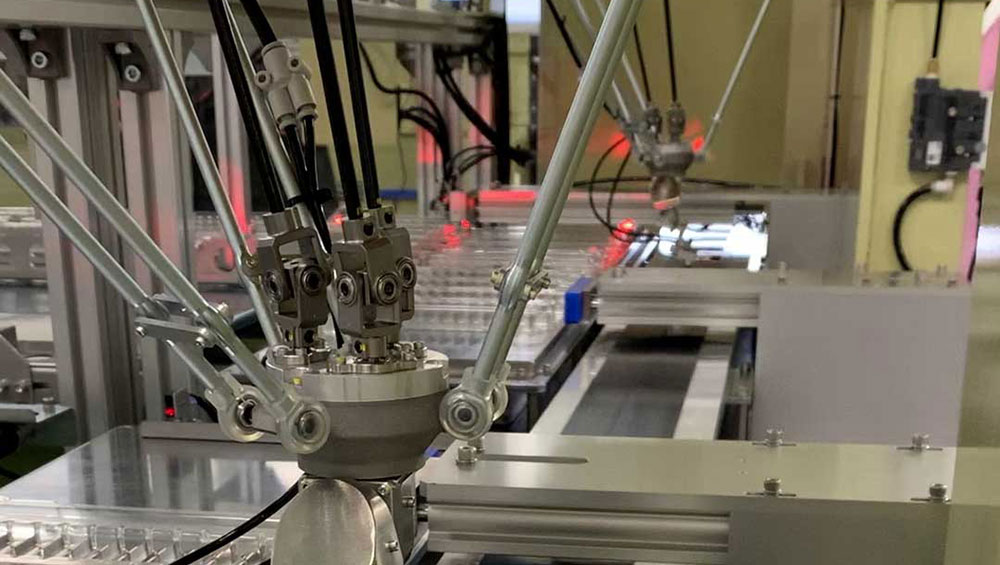
6軸多関節ロボットに、視覚センサー・荷重センサー・距離センサー等のセンシング機器を組み合わせ、搬送やパレタイズだけでなく、自動組付・自動検査までを行うロボットシステムを提案しロボットの可能性を広げます。ファナック・安川エンジニアリング等のロボットメーカーオプションのセンサー類以外のセンサーでも、PC・PLCと組み合わせオリジナルソフトを製作し、様々なアプリケーションに対応します。
- 人手不足を解消したい
- 人件費を削減したい
- 生産性を上げたい
- 人手作業を自動化して品質を安定させたい
- 危険な作業を自動化したい
- 単純作業を自動化したい
- 自動化はしたいが、どうしたらいいかわからない

このようなお悩みをお持ちのご担当者様、ぜひ一度エヌエスティーにご相談ください。事業内容、規模、体制に応じて柔軟な発想とアイデアで問題解決いたします。